依赖注入(DependencyInjector)
概念¶
依赖注入是一种设计模式。举一个很简单的例子来说明:
1 2 3 | |
C++实现依赖注入的例子¶
IOC(控制反转),是为了类对象间解耦合的一种设计思想。 DI(依赖注入),是一种IOC的实现,指的是依赖关系由外部注入,等等。
简单来说就是类A依赖类B,类B往往是一个抽象类(依赖倒置),类A不直接在内部new类B派生实现类的对象,因为这样会为类A引入了对类B具体派生类的直接依赖,转而由外部第三方DI容器生成对应的实现类对象,并通过构造函数之类注入类A对象里的类B成员变量中,而具体的实现类的选择则由外部配置来控制反转。
IOC和DI在java 后台开发领域非常常见,但是在C++目前也没有特别泛用的IOC框架(且更倾向用模板编译期行为来提高性能)。但是在日常开发中还是需要这种IOC的思想的。
根据SOILD原则,在代码开发,我们一般都会有抽象接口及多个接口实现子类,我们需要根据不同业务场景调用不同的接口实现子类,这种依赖关系实际是根据外部场景注入到实际业务类中。可以很方便业务的拓展及单元测试。
归根到底都是,寻找业务中容易变化的点,寻找解耦的点, 让其更加可控,让程序员改代码的时候容易些,同时对系统的影响更小。
Apollo中的依赖注入¶
以planning模块为例,其依赖注入是一个名为DependencyInjector的类,在这个类中存储着planning需要用到的历史信息。

在planningcomponent中需要用到该注入器。用来提供规划的历史信息。
其他的一些消息比如map、routing等是通过cyber中的订阅器reader来读取的。

简介¶
- planning包:表示apollo/modules/planning文件夹下的内容
- planning组件:表示apollo/modules/planning/planning_component.h文件中定义的PlanningComponent类、或者对应的对象
- planning模块:表示来自apollo/modules/planning/planning_base.h中的PlanningBase类、对象,以及其子类,包括OnLanePlanning、NaviPlanning类、对象等,本文针对OnLanePlanning类展开讨论,即代指OnLanePlanning模块
接下来介绍planning组件的逻辑梳理
数据流¶
要想更为清晰的理解planning模块的工作逻辑,需要对整个模块工作时的数据流进行初步了解。Apollo6.0 代码库的planning模块数据流大致如下图所示。
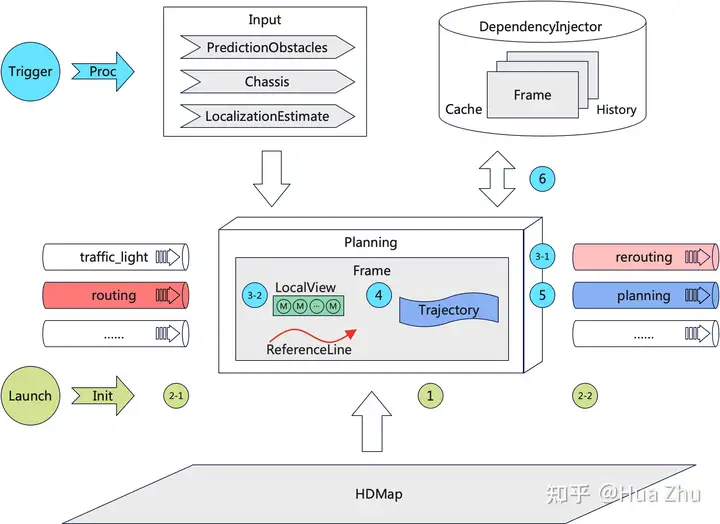
PlanningComponent 逻辑图
- 一个planning模块,作为planning的核心结构,负责规划工作
- 多个输入、输出通道(channel),负责与其他模块进行数据通信
- 一个数据缓存区(DependencyInjector),负责全程数据的缓存与交互
- 两个处理流,分别实现初始化(Init),和消息响应处理(Proc)
以下逐个进行简要介绍
组件对象 PlanningComponent¶
- planning组件,即PlanningComponent类、对象,其继承自cyber::Component
-
planning组件是一个支持3个channel输入的消息回调型组件,支持的消息类型分别如下:
-
预测消息:prediction::PredictionObstacles
- 底盘消息:canbus::Chassis
-
定位消息:localization::LocalizationEstimate
-
CyberRT系统收到上述任何一个消息后都会调起Planning组件的Proc函数进行消息响应(与回调型组件对应的是定时器型组件,即CyberRT中的定时器会按着一定的频率调用Proc函数)。
- planning模块,是实际的planning核心框架,作为planning组件的成员变量,实现具体的规划功能,具体逻辑本文暂不展开讲解。
组件数据缓存 DependencyInjector¶
- DependencyInjector:依赖注入器,这是一个过于专业的名词,来自软件设计模式的依赖倒置原则的一种具体实现方式,起到模块解耦作用。
- DependencyInjector本质就是一个数据缓存中心,叫DataCacheCenter可能更贴切些。
- DependencyInjector对象内部管理者planning模块工作过程中的实时数据和几乎全部历史数据,以便于规划任务的前后帧之间的承接,以及异常处理的回溯。
- DependencyInjector是以空对象的形式引入到planning组件中,进而引入到planning模块中用来承载中间数据。 DependencyInjector的类结构如下图所示:
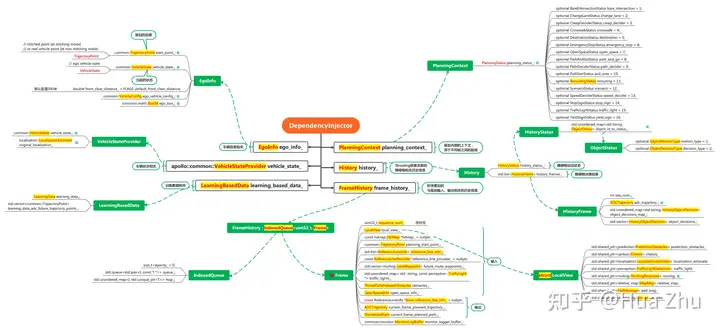
DependencyInjector结构图
- 依赖注入结构中主要有6类成员变量,分别如下:
- PlanningContext planning_context_:负责planning上下文的缓存,比如是否触发重新路由的ReroutingStatus信息
- History history_:负责障碍物状态的缓存,包括运动状态、决策结果。该数据与routing结果绑定,routing变更后会清理掉历史数据。
- FrameHistory frame_history_:是一个可索引队列,负责planning的输入、输出等主要信息的缓存,以Frame类进行组织,内部包含LocalView结构体(负责输入数据的融合管理)。与上述的History是不同的是,该缓数据自模块启动后就开始缓存所有的Frame对象,不受routing变动的影响。
- EgoInfo ego_info_:提供车辆动、静信息,即车辆运动状态参数(轨迹、速度、加速度等)和车辆结构参数(长宽高等)
- apollo::common::VehicleStateProvider vehicle_state_:车辆状态提供器,用于获取车辆实时信息
- LearningBasedData learning_based_data_:基于学习的数据,用于学习建模等
组件工作流¶
planning组件主要完成两项任务:初始化工作Init,消息响应工作Proc,具体过程可参考下图的1~6步
PlanningComponent逻辑图
初始化¶
- 初始化工作由CyberRT系统的launch命令触发,大致分为2步,核心代码整理截图如下
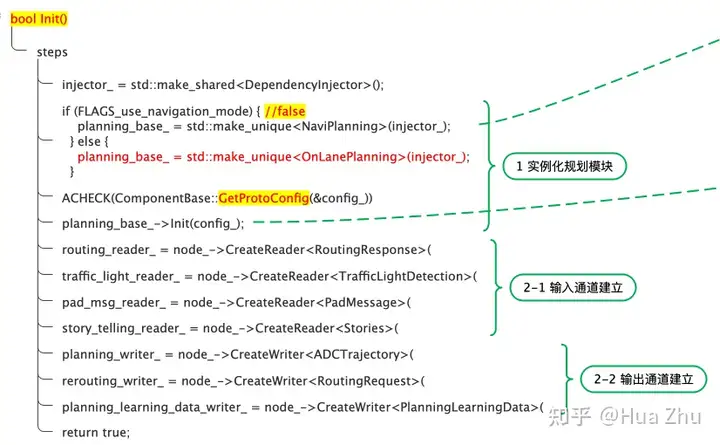
Init()
- 1、planning模块的初始化,根据标志位选择具体的PlanningBase子类,并调用Init函数初始化,图中1所示
- 2、建立消息通道(channel),包括输入通道traffic_light、routing等(图中2-1)和输出通道rerouting、planning等(图中2-2)
消息响应¶
- 消息响应由CyberRT在接收到关联消息(上文有提到3类中的任何1类)到达后触发,工作大致分为4步,核心代码整理截图如下
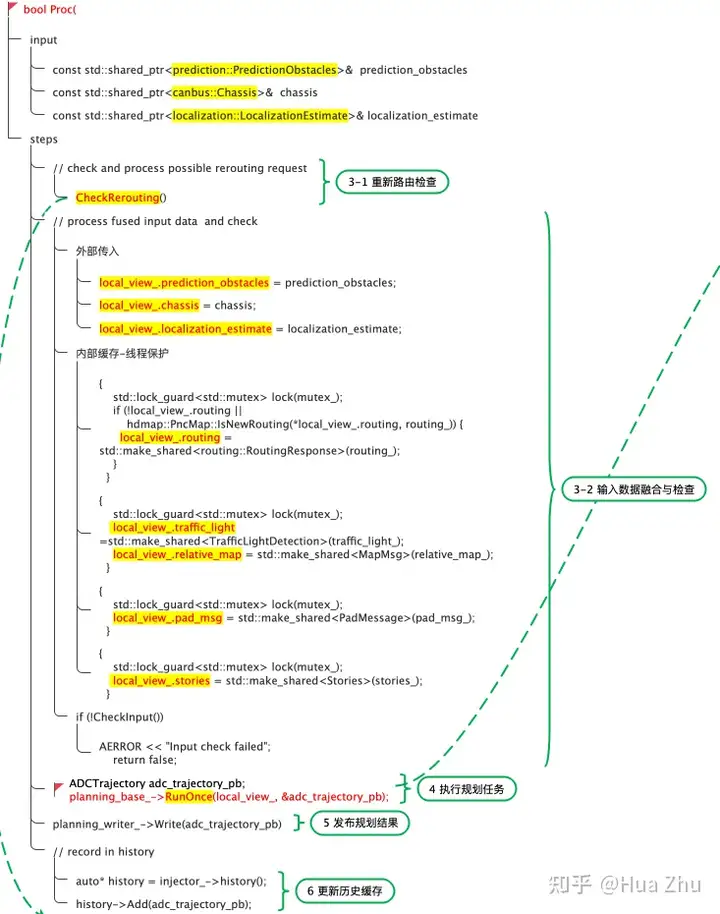
Proc()
- 3、工作前检查,包括重新进行路由的检查(图中3-1),如果需要会发送rerouting消息;输入数据融合与检查(图中3-2),数据来源包括外部传参和内部缓存数据,一并汇总到LocalView结构体中,实现融合,并最终会保存到Frame对象中
- 4、执行规划任务(图中4),此处会调用PlanningBase子类的RunOnce函数进行一次规划任务,生成规划后的轨迹
- 5、发布规划结果(图中5),利用已经创建的planning通道发送规划结果
- 6、更新历史缓存(图中6),将最终轨迹更新到history中(其他缓存在PlanningBase子类中完成的)以备不时之需